


liaisons méca
Hiérarchie des fichiers
| Téléchargements | ||||||
| Fichiers créés en ligne | (38760) | |||||
| TI-Nspire | (25538) | |||||
| mViewer GX Creator Lua | (20078) | |||||
DownloadTélécharger
Actions
Vote :
ScreenshotAperçu

Informations
Catégorie :Category: mViewer GX Creator Lua TI-Nspire
Auteur Author: ed300
Type : Classeur 3.6
Page(s) : 2
Taille Size: 195.42 Ko KB
Mis en ligne Uploaded: 27/02/2021 - 11:00:28
Mis à jour Updated: 27/02/2021 - 11:03:07
Uploadeur Uploader: ed300 (Profil)
Téléchargements Downloads: 23
Visibilité Visibility: Archive publique
Shortlink : http://ti-pla.net/a2704142
Type : Classeur 3.6
Page(s) : 2
Taille Size: 195.42 Ko KB
Mis en ligne Uploaded: 27/02/2021 - 11:00:28
Mis à jour Updated: 27/02/2021 - 11:03:07
Uploadeur Uploader: ed300 (Profil)
Téléchargements Downloads: 23
Visibilité Visibility: Archive publique
Shortlink : http://ti-pla.net/a2704142
Description
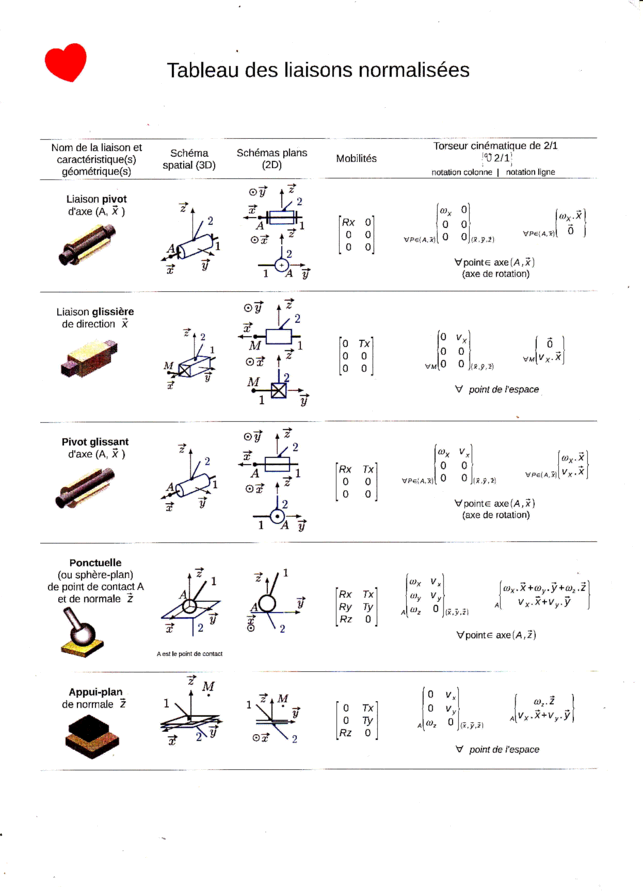
Tâbleau des Iiaisons normalisées
Nom de la liaison et Torseur cinématique de 211,
Schéma Schémas plans
caractéristique(s) Mobilités lql2/11
spatial(3D) (2D)
géométrique(s) notation colonne I notation ligne
oÿ +7
ii:?d'ii zL lt2
d i§/t
iv
l,z
)L*
+qF,
oÈ l'lr
L"A 'Û
-/â-
lnx
[:s]
o'l
Vpoint€ axe(e,ï)
(axe de rotation)
l"'ÿl
vpe(r,*)[ ô J
Liaison glissière oi
-..| lt
+z
de direction i 2
zt»
ti
+r-l
*u-L
l- (o v..l
iôl
rffi o*'!fl*,
r.
l'
,
^ir lz
l, il
lo
o,Io
dI
o )'r ''
Y
'.,t
point de /'espace
v"[vr. ÏJ
oû +2
Pivot glissant
d'axe (n, Î )
,l + 1,,2 (r, v,l /
,, f
+}l-
.--J-
lnx lo ol lar'x
-1
I
Y-* A-1 rx1
o o ),r,r,r, vP€(A,i)[vx i .
J
oi l' l:sl
vpe(,q,r)[
l{-1r
î+U
#n lz Vpoint€ axe(A,i)
(axe de rotation)
Ponctuelle
(ou sphère-plan) ('*
de point de contact A
ln" rrl lr, u,l
"1 , _ A( !or.7+atr.g+a,.zl
et de normale 2
llv ryl olr, o Jrr,r;r ^i '^"'
*.*+vr.g
_
v
)
lR' ol '
opointeaxe(A,Z)
A est le poinl de contact
7
Appui-plan vrl
. ?rM t-
I (D,.2
de normale 2
'æ- I: vul i *
Alvx.x+v y.y
*l
I
o )
ol,, ),r,t,^
of z
Y point de /'espace
Linéaire rectiligne
?+ È
d'axe (n, Ï ) rl o (r* ,"1
'l I à .]
et de normale 2 )ox. x +az.z
lo v..
,*o*,
I
vt
**
,.* *v ,.i
tiil
fr olv I
ol,, o ,,,,t
)o
Vpointe axe(e,Ï)
...
Nom de la liaison et Torseur cinématique de 211,
Schéma Schémas plans
caractéristique(s) Mobilités lql2/11
spatial(3D) (2D)
géométrique(s) notation colonne I notation ligne
oÿ +7
ii:?d'ii zL lt2
d i§/t
iv
l,z
)L*
+qF,
oÈ l'lr
L"A 'Û
-/â-
lnx
[:s]
o'l
Vpoint€ axe(e,ï)
(axe de rotation)
l"'ÿl
vpe(r,*)[ ô J
Liaison glissière oi
-..| lt
+z
de direction i 2
zt»
ti
+r-l
*u-L
l- (o v..l
iôl
rffi o*'!fl*,
r.
l'
,
^ir lz
l, il
lo
o,Io
dI
o )'r ''
Y
'.,t
point de /'espace
v"[vr. ÏJ
oû +2
Pivot glissant
d'axe (n, Î )
,l + 1,,2 (r, v,l /
,, f
+}l-
.--J-
lnx lo ol lar'x
-1
I
Y-* A-1 rx1
o o ),r,r,r, vP€(A,i)[vx i .
J
oi l' l:sl
vpe(,q,r)[
l{-1r
î+U
#n lz Vpoint€ axe(A,i)
(axe de rotation)
Ponctuelle
(ou sphère-plan) ('*
de point de contact A
ln" rrl lr, u,l
"1 , _ A( !or.7+atr.g+a,.zl
et de normale 2
llv ryl olr, o Jrr,r;r ^i '^"'
*.*+vr.g
_
v
)
lR' ol '
opointeaxe(A,Z)
A est le poinl de contact
7
Appui-plan vrl
. ?rM t-
I (D,.2
de normale 2
'æ- I: vul i *
Alvx.x+v y.y
*l
I
o )
ol,, ),r,t,^
of z
Y point de /'espace
Linéaire rectiligne
?+ È
d'axe (n, Ï ) rl o (r* ,"1
'l I à .]
et de normale 2 )ox. x +az.z
lo v..
,*o*,
I
vt
**
,.* *v ,.i
tiil
fr olv I
ol,, o ,,,,t
)o
Vpointe axe(e,Ï)
...






