


SI 2016 polynésie
Hiérarchie des fichiers
| Téléchargements | ||||||
| Fichiers créés en ligne | (37923) | |||||
| HP-Prime | (11025) | |||||
| mViewer GX Creator App | (10209) | |||||
DownloadTélécharger
Actions
Vote :
ScreenshotAperçu
Informations
Catégorie :Category: mViewer GX Creator App HP-Prime
Auteur Author: Overcrash89
Type : Application
Page(s) : 9
Taille Size: 530.85 Ko KB
Mis en ligne Uploaded: 02/04/2017 - 15:38:21
Uploadeur Uploader: Overcrash89 (Profil)
Téléchargements Downloads: 25
Visibilité Visibility: Archive publique
Shortlink : http://ti-pla.net/a892162
Type : Application
Page(s) : 9
Taille Size: 530.85 Ko KB
Mis en ligne Uploaded: 02/04/2017 - 15:38:21
Uploadeur Uploader: Overcrash89 (Profil)
Téléchargements Downloads: 25
Visibilité Visibility: Archive publique
Shortlink : http://ti-pla.net/a892162
Description
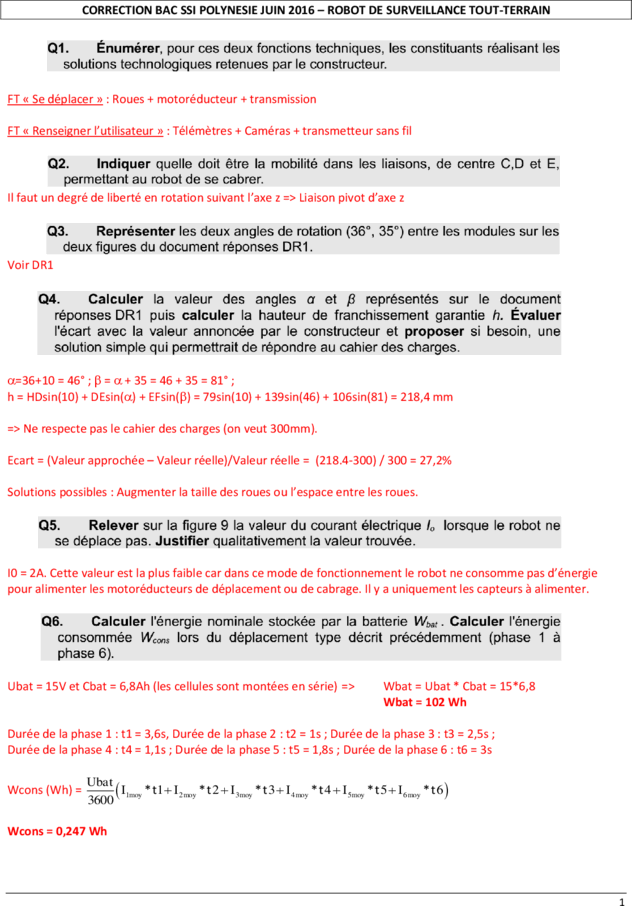
CORRECTION BAC SSI POLYNESIE JUIN 2016 – ROBOT DE SURVEILLANCE TOUT-TERRAIN
FT « Se déplacer » : Roues + motoréducteur + transmission
FT « Renseigner l’utilisateur » : Télémètres + Caméras + transmetteur sans fil
Il faut un degré de liberté en rotation suivant l’axe z => Liaison pivot d’axe z
Voir DR1
=36+10 = 46° ; = + 35 = 46 + 35 = 81° ;
h = HDsin(10) + DEsin() + EFsin() = 79sin(10) + 139sin(46) + 106sin(81) = 218,4 mm
=> Ne respecte pas le cahier des charges (on veut 300mm).
Ecart = (Valeur approchée – Valeur réelle)/Valeur réelle = (218.4-300) / 300 = 27,2%
Solutions possibles : Augmenter la taille des roues ou l’espace entre les roues.
I0 = 2A. Cette valeur est la plus faible car dans ce mode de fonctionnement le robot ne consomme pas d’énergie
pour alimenter les motoréducteurs de déplacement ou de cabrage. Il y a uniquement les capteurs à alimenter.
Ubat = 15V et Cbat = 6,8Ah (les cellules sont montées en série) => Wbat = Ubat * Cbat = 15*6,8
Wbat = 102 Wh
Durée de la phase 1 : t1 = 3,6s, Durée de la phase 2 : t2 = 1s ; Durée de la phase 3 : t3 = 2,5s ;
Durée de la phase 4 : t4 = 1,1s ; Durée de la phase 5 : t5 = 1,8s ; Durée de la phase 6 : t6 = 3s
Wcons (Wh) =
Ubat
3600
I1moy *t1 I 2moy *t 2 I3moy *t 3 I 4moy *t 4 I5moy *t 5 I6moy *t 6
Wcons = 0,247 Wh
1
I1moy I 2 moy I 3moy I 4 moy I 5moy I 6moy
Puissance consommée par le robot : Pcons = Ubat * Imoy = Ubat *
6
Pcons = 75,5 W
Temps d’autonomie : tauto = Wbat / Pcons = 102 / 75.5 => tauto = 1,35h = 81 min
81* 60
Le robot parcourt 5 mètres en 13,6s donc la distance qu’il peut parcourir est : d 5 => d = 1,79 km
13.6
Ecart en autonomie : Ecart = (81-120) / 120 = 32,5%
Dans la réalité le robot n’enchaine pas des phases 1 à 6 mais a des temps de scrutations ce qui diminue la
consommation totale ; De plus, dans la réalité la décharge n’est pas à courant constant (on voit des pics de
courants sur le chronogramme)
Ecart en distance : On veut 300m donc Ecart = (1790 - 300) /300 = 497%
Le cahier des charges est rempli
Si on prend en compte que la tension doit rester supérieure à 15V : tauto = 850s = 14,17min
Si on prend en compte que la tension doit rester supérieure à 10V : tauto = 3520s = 58,3min
Dans les deux cas l’autonomie trouvée en simulation est inférieure à celle calculée à partir des relevés
expérimentaux.
Cela vient du fait que dans les calculs expérimentaux on a considéré que la tension restait constante à 15V
I0 = 2A ; I3moy = I5moy = 3,5A => Ietabli = I3moy – I0 = 3,5 – 2 => Ietabli = 1,5A sous Ubat = 15V
Cela entraine une puissance électrique consommée de Pabsorbée = 1,5 * 15 = 22,5 W
Dans DT1, pour cette valeur de puissance consommée on lit une puissance utile (puissance moteur) de Pmot = 15W
On en déduit le rendement : = 67%
On se trouve dans l’intervalle où se situe le rendement maximal du moteur ainsi la consommation est optimisée au
maximum.
rendement = 67%
Remarque : On peut répondre à cette
question de plusieurs manières,par
exemple sans passer par la tension
mais avec la courbe du courant…
Pabs = 22.5W
Putile = 15W
Putile = 15W
2
Ualerte= 14,4V
80% de Cnominale Tension de coupure = 10V
La tension de décharge (ou de
coupure) est donnée à Cnominale
Cnominale = 6,8Ah donc Calerte = 80% de 6,8Ah => Calerte = 5,44Ah
On en déduit Ubat(alerte) = 14,4V
0, 2
Unominale = 15V ; On veut un quantum de q = 0, 3 * *15 9mV
100
Il faut donc un CAN avec un quantum de 9 mV (avec une tension de référence de 0-5V)
5
Il faut pouvoir coder : n 9mV => 2n 555.5 donc n ≥ 10 bits. (résolution du CAN de 10 bits)
2
Trame émise : 02 12 00 00 03 (trame de lecture des paramètres de la batterie)
DATA_0 DATA_1
Trame de retour : 02 12 (XX XX) 03
Il y a une coquille dans le document constructeur ce qui rend confus pour
DATA_0 : Octet de poids faible savoir qui est le poids fort / poids faible entre DATA_0 et DATA_1 !
DATA_1 : Octet de poids fort
J’ai choisi cette solution…
2 1
10
Charge à 80% = > Ubat = 14,4 V donc N = * 0.3 *14.4 = 883.8 = 884 =0374h
5
Trame de retour : 02 12 74 03 03
Théorème du moment dynamique à vitesse constante au point A : Cr Croue M A P 0
Cr z Croue z R y P 0 => Cr Croue Rmg sin 0
Croue = Cr + Rmgsin() (à diviser par 8 si nécessaire mais dans le sujet on pose P = poids / 8)
3
Théorème du moment dynamique au point A : Cr M A P M A Fp / 8 M A Rsol / roue 0
Fp Fp
Cr z R y 0 => Cr R 0
8 8
Cr = R*Fp/8
AN : Cr = (0.11/2)*35/8 = 0.24 Nm
Les hypothèses sont prises en compte par la multiplication par 8 à l’aide du bloc de multiplication
« Multiplication3 ».
Imot(1) = 7A
Imot(3) =3A
Imot(2) = 1,6A
Imot(1) = 7A => Appel de courant (accélération)
Imot(2) = 1,6A => Déplacement à vitesse constante et = 0°
Imot(3) = 3A => Déplacement à = 30°
Imot(1) = 7A Pic de la phase 1 (I = 10A) => Ecart = (7 – 10)/10 = 30%
Imot(2) = 1,6A Phases 3 et 5 (I = 3,5A) => Ecart = (1.6 – 3.5) / 3.5 = de 54,2%
Imot(3) = 3A Phase 6 (I = 5,3A) => Ecart de (3 – 5.3) / 5.3 = 43,4%
L’évolution des valeurs est cohérente mais les valeurs ne sont pas identiques avec les relevés
expérimentaux.
Le modèle permet de rendre compte de l’évolution dynamique du courant mais pas des valeurs statiques
avec précision.
4
Imot(plat) = 1,6A
Sur DT1 on lit pour Imot = 1,6A Cu (couple utile) = 2,5Nm donc Cmot = 2,5Nm
Cmot * 2, 5 * 0.8
On en déduit le couple transmis aux roues : Croue = => Croue = 2Nm (pour les deux roues)
r 1
Effort de traction
(N)
375
50 Distance (m)
Courant de démarrage I = 7A donc Imot(max) = 0,7*7=4,9A
Masse totale de 16 kg
Soit 6 kg transportable
Cette valeur suffit amplement pour embarquer de
l’équipement optionnel.
5
Pour U = 13,6V on lit : Temps (avec cable) = 1080s ; Temps (sans cable) = 1600s soit un écart de 48%
L’autonomie du robot avec un câble sera donc 48% plus faible que sans câble.
Pour Umot = 4,95V on lit sur DT1 une vitesse de rotation du
moteur de N = 19 tr/min soit mot = 1,99 rad/s
V = *R = 1,99 * (0.11/2) = 0.109 m/s
La vitesse souhaitée étant de (4/5) (km/h) soit 0.22m/s le cahier
des charges est respecté.
Consigne de 0% => 0m/s
Consigne de 33% => 0,109 m/s
Consigne de 66% => V = 66*0.109/33 = 0.218 m/s
C’est avec la consigne de 66% qu’on s’approche au mieux de la valeur souhaitée.
Consigne de 0% => X = 0
Consigne de 33% => X = 33*1023/100 = 337
Consigne de 66% => X = 66*1023/100 = 675
Consigne de 100% => X = 210 – 1 = 1023
Voir DR2
...
FT « Se déplacer » : Roues + motoréducteur + transmission
FT « Renseigner l’utilisateur » : Télémètres + Caméras + transmetteur sans fil
Il faut un degré de liberté en rotation suivant l’axe z => Liaison pivot d’axe z
Voir DR1
=36+10 = 46° ; = + 35 = 46 + 35 = 81° ;
h = HDsin(10) + DEsin() + EFsin() = 79sin(10) + 139sin(46) + 106sin(81) = 218,4 mm
=> Ne respecte pas le cahier des charges (on veut 300mm).
Ecart = (Valeur approchée – Valeur réelle)/Valeur réelle = (218.4-300) / 300 = 27,2%
Solutions possibles : Augmenter la taille des roues ou l’espace entre les roues.
I0 = 2A. Cette valeur est la plus faible car dans ce mode de fonctionnement le robot ne consomme pas d’énergie
pour alimenter les motoréducteurs de déplacement ou de cabrage. Il y a uniquement les capteurs à alimenter.
Ubat = 15V et Cbat = 6,8Ah (les cellules sont montées en série) => Wbat = Ubat * Cbat = 15*6,8
Wbat = 102 Wh
Durée de la phase 1 : t1 = 3,6s, Durée de la phase 2 : t2 = 1s ; Durée de la phase 3 : t3 = 2,5s ;
Durée de la phase 4 : t4 = 1,1s ; Durée de la phase 5 : t5 = 1,8s ; Durée de la phase 6 : t6 = 3s
Wcons (Wh) =
Ubat
3600
I1moy *t1 I 2moy *t 2 I3moy *t 3 I 4moy *t 4 I5moy *t 5 I6moy *t 6
Wcons = 0,247 Wh
1
I1moy I 2 moy I 3moy I 4 moy I 5moy I 6moy
Puissance consommée par le robot : Pcons = Ubat * Imoy = Ubat *
6
Pcons = 75,5 W
Temps d’autonomie : tauto = Wbat / Pcons = 102 / 75.5 => tauto = 1,35h = 81 min
81* 60
Le robot parcourt 5 mètres en 13,6s donc la distance qu’il peut parcourir est : d 5 => d = 1,79 km
13.6
Ecart en autonomie : Ecart = (81-120) / 120 = 32,5%
Dans la réalité le robot n’enchaine pas des phases 1 à 6 mais a des temps de scrutations ce qui diminue la
consommation totale ; De plus, dans la réalité la décharge n’est pas à courant constant (on voit des pics de
courants sur le chronogramme)
Ecart en distance : On veut 300m donc Ecart = (1790 - 300) /300 = 497%
Le cahier des charges est rempli
Si on prend en compte que la tension doit rester supérieure à 15V : tauto = 850s = 14,17min
Si on prend en compte que la tension doit rester supérieure à 10V : tauto = 3520s = 58,3min
Dans les deux cas l’autonomie trouvée en simulation est inférieure à celle calculée à partir des relevés
expérimentaux.
Cela vient du fait que dans les calculs expérimentaux on a considéré que la tension restait constante à 15V
I0 = 2A ; I3moy = I5moy = 3,5A => Ietabli = I3moy – I0 = 3,5 – 2 => Ietabli = 1,5A sous Ubat = 15V
Cela entraine une puissance électrique consommée de Pabsorbée = 1,5 * 15 = 22,5 W
Dans DT1, pour cette valeur de puissance consommée on lit une puissance utile (puissance moteur) de Pmot = 15W
On en déduit le rendement : = 67%
On se trouve dans l’intervalle où se situe le rendement maximal du moteur ainsi la consommation est optimisée au
maximum.
rendement = 67%
Remarque : On peut répondre à cette
question de plusieurs manières,par
exemple sans passer par la tension
mais avec la courbe du courant…
Pabs = 22.5W
Putile = 15W
Putile = 15W
2
Ualerte= 14,4V
80% de Cnominale Tension de coupure = 10V
La tension de décharge (ou de
coupure) est donnée à Cnominale
Cnominale = 6,8Ah donc Calerte = 80% de 6,8Ah => Calerte = 5,44Ah
On en déduit Ubat(alerte) = 14,4V
0, 2
Unominale = 15V ; On veut un quantum de q = 0, 3 * *15 9mV
100
Il faut donc un CAN avec un quantum de 9 mV (avec une tension de référence de 0-5V)
5
Il faut pouvoir coder : n 9mV => 2n 555.5 donc n ≥ 10 bits. (résolution du CAN de 10 bits)
2
Trame émise : 02 12 00 00 03 (trame de lecture des paramètres de la batterie)
DATA_0 DATA_1
Trame de retour : 02 12 (XX XX) 03
Il y a une coquille dans le document constructeur ce qui rend confus pour
DATA_0 : Octet de poids faible savoir qui est le poids fort / poids faible entre DATA_0 et DATA_1 !
DATA_1 : Octet de poids fort
J’ai choisi cette solution…
2 1
10
Charge à 80% = > Ubat = 14,4 V donc N = * 0.3 *14.4 = 883.8 = 884 =0374h
5
Trame de retour : 02 12 74 03 03
Théorème du moment dynamique à vitesse constante au point A : Cr Croue M A P 0
Cr z Croue z R y P 0 => Cr Croue Rmg sin 0
Croue = Cr + Rmgsin() (à diviser par 8 si nécessaire mais dans le sujet on pose P = poids / 8)
3
Théorème du moment dynamique au point A : Cr M A P M A Fp / 8 M A Rsol / roue 0
Fp Fp
Cr z R y 0 => Cr R 0
8 8
Cr = R*Fp/8
AN : Cr = (0.11/2)*35/8 = 0.24 Nm
Les hypothèses sont prises en compte par la multiplication par 8 à l’aide du bloc de multiplication
« Multiplication3 ».
Imot(1) = 7A
Imot(3) =3A
Imot(2) = 1,6A
Imot(1) = 7A => Appel de courant (accélération)
Imot(2) = 1,6A => Déplacement à vitesse constante et = 0°
Imot(3) = 3A => Déplacement à = 30°
Imot(1) = 7A Pic de la phase 1 (I = 10A) => Ecart = (7 – 10)/10 = 30%
Imot(2) = 1,6A Phases 3 et 5 (I = 3,5A) => Ecart = (1.6 – 3.5) / 3.5 = de 54,2%
Imot(3) = 3A Phase 6 (I = 5,3A) => Ecart de (3 – 5.3) / 5.3 = 43,4%
L’évolution des valeurs est cohérente mais les valeurs ne sont pas identiques avec les relevés
expérimentaux.
Le modèle permet de rendre compte de l’évolution dynamique du courant mais pas des valeurs statiques
avec précision.
4
Imot(plat) = 1,6A
Sur DT1 on lit pour Imot = 1,6A Cu (couple utile) = 2,5Nm donc Cmot = 2,5Nm
Cmot * 2, 5 * 0.8
On en déduit le couple transmis aux roues : Croue = => Croue = 2Nm (pour les deux roues)
r 1
Effort de traction
(N)
375
50 Distance (m)
Courant de démarrage I = 7A donc Imot(max) = 0,7*7=4,9A
Masse totale de 16 kg
Soit 6 kg transportable
Cette valeur suffit amplement pour embarquer de
l’équipement optionnel.
5
Pour U = 13,6V on lit : Temps (avec cable) = 1080s ; Temps (sans cable) = 1600s soit un écart de 48%
L’autonomie du robot avec un câble sera donc 48% plus faible que sans câble.
Pour Umot = 4,95V on lit sur DT1 une vitesse de rotation du
moteur de N = 19 tr/min soit mot = 1,99 rad/s
V = *R = 1,99 * (0.11/2) = 0.109 m/s
La vitesse souhaitée étant de (4/5) (km/h) soit 0.22m/s le cahier
des charges est respecté.
Consigne de 0% => 0m/s
Consigne de 33% => 0,109 m/s
Consigne de 66% => V = 66*0.109/33 = 0.218 m/s
C’est avec la consigne de 66% qu’on s’approche au mieux de la valeur souhaitée.
Consigne de 0% => X = 0
Consigne de 33% => X = 33*1023/100 = 337
Consigne de 66% => X = 66*1023/100 = 675
Consigne de 100% => X = 210 – 1 = 1023
Voir DR2
...






